Manual loading and unloading is inefficient and unsafe.
Limited space available for traditional automation equipment, which is costly, hard to program and takes up a lot of space.
Solution:
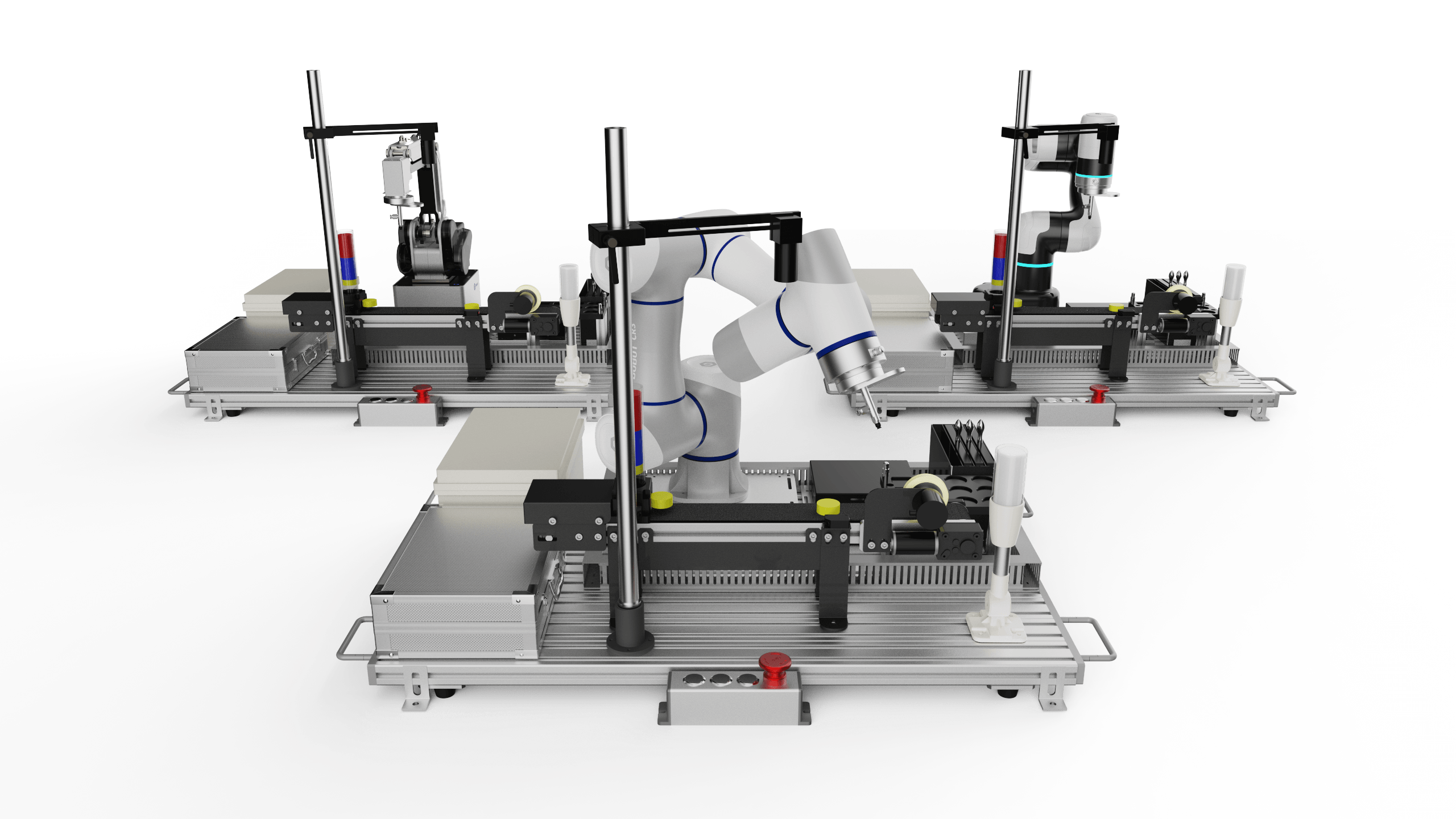
A CR10 robot with double gripper end effector grabs an unprocessed part and complete its loading and unloading of a processed part at once which greatly improves production efficiency.
Value Proposition:
Replaces 2 workers.
Reduces chance of workplace injuries.
Increases efficiency by 20%.
99% production yield.
Payback period <12 months.
Product Highlights:
A CR10 collaborative robot has a 1300 mm working radius to satisfy the needs of tasks which require a long reach.
The robot supports graphical programming and no code drag-to-teach which greatly improves deployment time for different kinds of loading and unloading tasks.
* The above data is the test results obtained by Dobot Laboratory under controlled experimental conditions, which may have slight differences from those in actual application scenarios.
Establish Contact with Dobot Experts
Take part in automation transformation. Let’s work together towards a more efficient tomorrow.
Contact Information
Virtual Controller Application
We provide a free trial application for the robot cloud virtual controller. Fill in the following information and we will issue you a 12-hour license.
Contact Information
File sent
The related product information has been sent, please kindly check your email.
Loading, please wait...
Join Dobot+ Ecosystem to Forge Deeper Partnerships
Dobot sincerely invites robotics software companies and hardware manufacturers to Dobot+. Together we can offer best in class solutions to end users in various industries.




 Metal Processing
Metal Processing
 Automotive
Automotive
 Food & Beverage
Food & Beverage
 Chemical
Chemical
 Consumer Electronics
Consumer Electronics
 Healthcare
Healthcare
 New Retail
New Retail
 Semiconductor
Semiconductor
 Welding
Welding
 Palletizing
Palletizing
 Loading and Unloading
Loading and Unloading
 Assembly
Assembly
 Bin Picking
Bin Picking
.svg) Gluing
Gluing
 Insertion
Insertion
 Polishing
Polishing
.png)