Home >
News >
Blog >
Robotics Tutorial | How to Build Robotic Arm with Dobot
Robotics Tutorial | How to Build Robotic Arm with Dobot
#Blog · Mar 17, 2022
Robotics Tutorial | How to Build Robotic Arm with Dobot
If you are still figuring out how to run a robotic arm, this detailed robotics tutorial is for you. We will further outline the critical points of installing Dobot robotic arms using the MG400 collaborative robot. We will also provide some handy hints on how to build robotic arm. As installing robotic arms for various brands is almost the same, this guide will be a helpful hand not only for Dobot users but for those interested in robotics.
The Association for Advancing Automation states that in 2021, in comparison to 2020, there was an industrial robotic boom in the U.S., ordering 29,000 robots. It is a 37% increase during the same period in 2020. Considering this data, there is an ongoing demand for robots globally. Thus, there is a need to learn how to install and build robots in the modern world.
Process of running Dobot robotic arm MG400:
1. Keep in mind Dobot Hardware
Those who start running a robotic arm have to know its basics. For example, MG400 consists of four joints compared to the CR series collaborative robot, having six joints. Also, turning on an emergency button and plugging all the Internet connections are crucial actions to support Dobot hardware.
However, we must not forget about the general structure of the MG400 robotic arm.
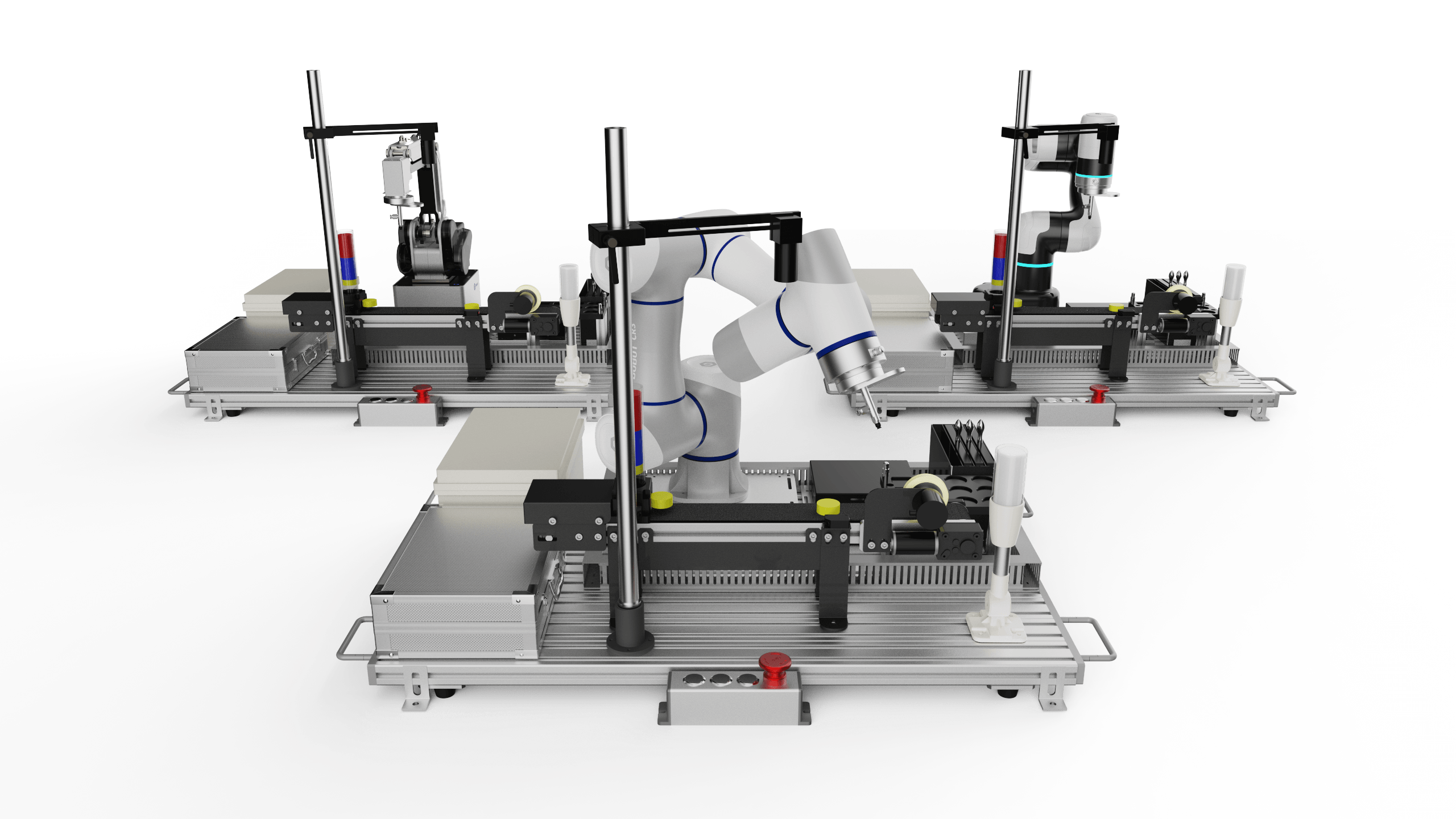
The collaborative robot work system consists of the robot body, robot control software, and robot operation software. DOBOT MG400 supports a direct connection with a computer, which is simple and easy to use. With the self-developed dynamic algorithm, one-handed teach-in and sensor-less collision detection ensure the safety of humans and machines working alongside. DOBOT MG400 has a repeated positioning accuracy of ± 0.05mm and a maximum load of 500g, combining the features of both industrial and collaborative robots.
2. Use DOBOT Studio software to code on MG400
DOBOT Studio is a multi-functional control software of Dobot robotic arms, enabling them to control their various types, ranging from educational to industrial purpose of use, including MG400,DOBOT Magician, DOBOT CR series, etc. The interface is easy to understand, helping users master the skills to build robotic arm.
It is free software, providing two options for users:
adopting Blockly, or
using LUA programming language.
Blockly is the Dobot’s integrated system of building coding blocks. It does not require any knowledge of coding.
The second option of applying the LUA programming language is for experienced programmers. It will require specific knowledge of LUA coding.
Another alternative if you want to use other programming languages such as Python, C, C++ is that you can use your platform to program. There are vast options for programming creativity with Dobot collaborative robots.
3. Connect robotic hardware to a laptop using Internet protocols
Internet protocols, such as TCP/IP, Modbus, and IO (input-output) aim to give a robotic arm a signal that it is ready to run.
There is also an encoder protocol that is not often used but still needs to know how to implement into a mechanical structure.
As the communication based on TCP/IP has high reliability, strong practicability, and high performance aligned with low cost, many industrial automation projects have a vast demand for control robots that support TCP/IP protocol. The MG400 robot, designed based on TCP/IP protocol, provides rich interfaces for interaction with external devices.
Modbus protocol is a serial communication protocol. The robot system can communicate with external equipment by this protocol. Here, external equipment such as a PLC is set as the Modbus master, and the robot system is set as the slave.
I/O protocol stands for inputting internal data and output with the data transmitted to external sources. This data communication protocol aims to have this circle of sending and receiving data. At the same time, the I/O interface might contain additional resources, including registers, a voltage translator, and others.
Keeping in mind the key points of running the DOBOT MG400 will assist you in saving time in the installation process.
The process of deploying MG400 provided above is your starting point for automation. However, you are not alone in this way. Our customer from the Netherlands, Robin Zonneveld, is showing in detail how to deploy MG400:
He also covers the pros and cons of using the Dobot robotic arm.
Although the process of running MG400 cobot is transparent, the Dobot team highlights valuable tips to become an expert to build robotic arm and increase operational efficiency.
Handy hints for those who start their journey on building a robot:
1. Hardware installation hint
While running the MG400 robot, users should design the platform according to the robot’s workspace and ensure that the robot moves without interference. When operating the robot, be sure to operate inside the workspace. It is critical to keep the platform level that is used to mount a robot.
2. Basic skills in LUA programming language
Without proper skills in the LUA programming language, it will not be easy to code using DOBOT MG400.
One of the tips we can provide is setting a Jump Movement function of a robotic arm. Using the LUA script, the command is as follows:
local Option={SpeedL=50, AccL=20, Start=10, ZLimit=100, End=20}
Jump(P, Option)
The required parameter you need to deploy is P, indicating the target point, user-defined or obtained from the points list.
3. Strong knowledge of Internet protocols, including TCPIP, Modbus, and IO
It is better to avoid unnecessary I/O interfaces. For instance, switching off debug output is one way to increase production run.
Bottom Line
How to build robotic arm to cover a rich application set is a tricky question. It requires different skills and knowledge, while at the same time, users have to know an algorithm for installing DOBOT MG400.
That is why the Dobot team prepared for you a helpful guide to make it clear to our users how to install Dobot robotic arms using MG400 collaborative robot.
Automate the future with Dobot and deliver the industrial value today.
Check out five simple tips for automated palletizing here.
Take part in automation transformation. Let’s work together towards a more efficient tomorrow.
Contact Information
Virtual Controller Application
We provide a free trial application for the robot cloud virtual controller. Fill in the following information and we will issue you a 12-hour license.
Contact Information
File sent
The related product information has been sent, please kindly check your email.
Loading, please wait...
Join Dobot+ Ecosystem to Forge Deeper Partnerships
Dobot sincerely invites robotics software companies and hardware manufacturers to Dobot+. Together we can offer best in class solutions to end users in various industries.




 Metal Processing
Metal Processing
 Automotive
Automotive
 Food & Beverage
Food & Beverage
 Chemical
Chemical
 Consumer Electronics
Consumer Electronics
 Healthcare
Healthcare
 New Retail
New Retail
 Semiconductor
Semiconductor
 Welding
Welding
 Palletizing
Palletizing
 Loading and Unloading
Loading and Unloading
 Assembly
Assembly
 Bin Picking
Bin Picking
.svg) Gluing
Gluing
 Insertion
Insertion
 Polishing
Polishing